Fully submerged bodies
Section titled “Fully submerged bodies”| Equilibrium type | Description |
|---|---|
| Stable | is above |
| Unstable | is below |
| Neutral |
Floating bodies
Section titled “Floating bodies”Suppose a body of weight acting through the centre of gravity is floating in a fluid is at equilibrium. The buoyancy acts through the centre of buoyancy .
Metacentre
Section titled “Metacentre”Intersection point between the line of action of through and the axis . Denoted by .
For small displacements is fixed in position relative to the body.
Stability conditions
Section titled “Stability conditions”| Equilibrium type | Description | Condition |
|---|---|---|
| Stable | is above | |
| Unstable | is below | |
| Neutral |
Metacentric height
Section titled “Metacentric height”The distance . Measured upwards from .
Metacentric radius
Section titled “Metacentric radius”The distance . Measured upwards from .
Calculating metacentric height
Section titled “Calculating metacentric height”Experimental value
Section titled “Experimental value”The metacentric height of a floating body can be determined experimentally by shifting a known weight by a known distance and measuring the angle of tilt.
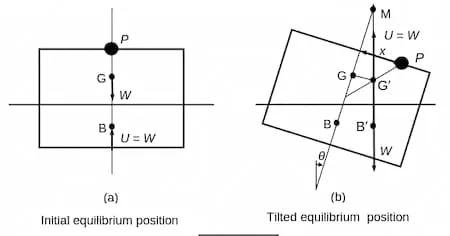
In the above picture
- - a small mass
- - initial centre of mass
- - initial centre of buoyancy
- - total weight of floating body
- - upthrust exerted on floating body
- - new centre of mass
- - new centre of buoyancy
- - small displacement applied to
Considering the shift in centre of gravity:
When is very small:
Theoretical value
Section titled “Theoretical value”If the shape of the submerged volume is known, the metacentric height can theoretically be determined.
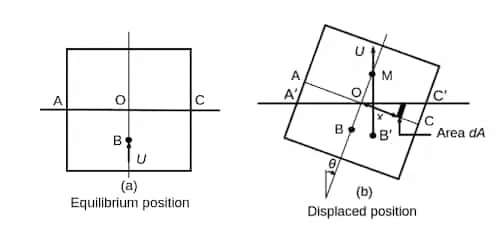
Rotation is about centroidal axis of waterline plane
Section titled “Rotation is about centroidal axis of waterline plane”As the submerged volume remains unchanged during angular displacement, it can be derived that the rotation occurs about the centroidal axis of the waterline plane.
Here,
- - area of waterline plane
- - distance to the centroid from axis
Equation for metacentric radius
Section titled “Equation for metacentric radius”Considering the shift in centre of buoyancy:
Here
- - submerged volume
- - second moment of area of the waterline plane about the centroidal axis
This result is restricted to small angular displacements — usually up to about — and the restriction is particularly important when the sides of the floating body are not vertical.
and can be calculated easily for a body with known shape. Then the metacentric height can be found.
Types of tilting
Section titled “Types of tilting”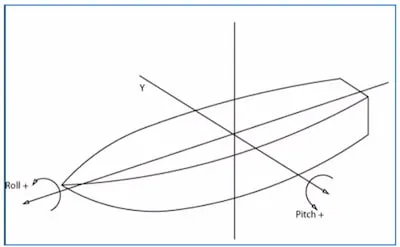
- Pitching - tilting about transverse axis
- Rolling - tilting about longitudinal axis
Time period of oscillation
Section titled “Time period of oscillation”Below equation can be derived by using (for small ):
Here
- - restoring torque
- - Total weight
- - Moment of inertia of the body about axis of rotation
- - Total mass
- - Radius of gyration about axis of rotation
Period of time of oscillation is given by:
Liquid cargo in a vessel
Section titled “Liquid cargo in a vessel”- Liquid cargo in a vessel reduces its metacentric height.
- When the cargo is contained in 1 compartment:
- When the liquid cargo is contained in compartments: